Алгоритмы слежения за спутником

Лебедев Валентин Павлович
кандидат физико-математических наук, старший научный сотрудник Института солнечно-земной физики СО РАН
Разговор о том, о том, какие алгоритмы наблюдения и сопровождения спутников используются в практике на сегодгняшний день.
#ТехнологииБеспроводнойСвязи #спутник #АлгоритмыСлежения
Поговорим о самых основных алгоритмах. Чтобы лучше разобраться в этой теме, давайте вспомним, что спутник вращается. Мы говорим про Землю. Например, он вращается вокруг Земли под действием ряда сил. Но основная сила, которая действует на спутник,
это, конечно, гравитация Земли. Дальше, в зависимости от его высоты, это могут быть: Луна, торможение в атмосфере, давление гравитационного света, радиационное давление солнечных лучей, влияние магнитного поля Земли также действует на спутник
- то есть там достаточно много сил. Основной вклад вносит, конечно, гравитационное поле Земли.
Спутник, в отличие от квадракоптера или каких-то достаточно мобильных устройств, не совершает резких скачков. Да, на спутниках могут быть двигатели, да, он может поменять, включив двигатели, свою позицию, придав себе дополнительный импульс, но все равно эти движения достаточно плавные. Основной характер движения спутника, если мы говорим о движении вокруг Земли, — это движение по некоторому эллипсу, на который воздействует возмущающая сила, и этот эллипс немного поворачивается, сдвигается.
Фактически, если мы знаем точное движение спутника по орбите, мы можем сделать прогноз его движения, найти его позицию в какой-то момент времени и туда навести свое устройство наблюдения. Устройств наблюдения за спутником несколько, это разные диапазоны длин волн. Наиболее распространённое — это наблюдение спутника в оптическом диапазоне, то есть солнечный свет падает на спутник, отражается, и мы видим отраженный солнечный свет уже где-то на Земле. А если мы возьмем телескоп, то мы можем увидеть спутник и можем разглядеть даже самый тусклый объект.
Итак, по большому счету, у нас есть два типа устройств, которые позволяют сопровождать, наблюдать спутники: это телескопы в оптическом диапазоне длин волн и какие-то радиолокационные станции, которые используют свой радиолокационный сигнал, который излучается, отражается от спутника и возвращается.
В принципе, если спутник излучает сигнал, то этот сигнал радиолокаторы тоже могут использовать, как полезно, для того, чтобы лучше определить позицию объекта. А вообще, когда мы говорим про алгоритмы сопровождения спутника, мы должны принимать во внимание инерцию того устройства, который наблюдает объект. Например, если вы наблюдаете какой-то очень большой телескоп или у вас какая-то большая антенна, та же самая антенна 70 метров, которая механически поворачивается, то надо понимать, что она не может мгновенно перестроить свою позицию, она обладает какой-то инерцией. Смоделируем ситуацию, когда вы наблюдаете спутник и хотите аккуратно выйти на его траекторию.
Рисунок 1. Траектория спутника
Допустим, вы обнаружили спутник и хотите навестись на него телескопом. Стандартные PID-алгоритмы, которые рассматривают на кружках, подразумевают, что у нас есть система с обратной связью и нужно повернуть объект пропорционально невязке, это стандартный алгоритм PID, PID-пропорциональный. В принципе, сюда можно добавить еще дифференциальный характер движения объекта, который связан со скоростью изменения этой невязки. Или вы можете какой-то интегральный характер проследить этого объекта, вот стандартный PID-алгоритм.
Рисунок 2. PID-алгоритм
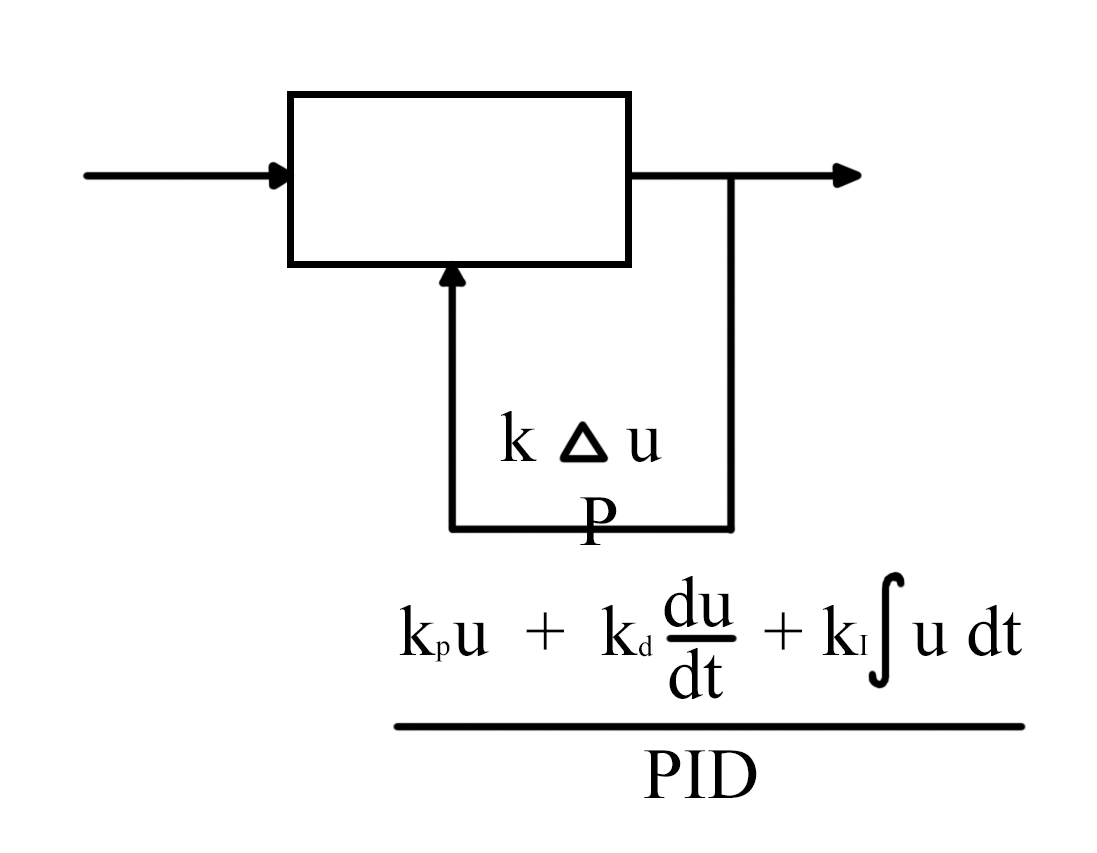
В этом случае (рисунок 2) вы отслеживаете ещё какие-то плавные изменения, плавный уход. То есть, допустим, второе слагаемое - это резкий поворот машины, а третий - у машины левое колесо немножечко, на полмиллиметра, стерлось больше, чем правое, и машина потихонечку уходит, и этот плавный характер смещения машины, будет отыгрывать третье слагаемое. А когда вы работаете со спутником, и, допустим, у вас есть какой-то тяжелый телескоп, который должен следить за объектом, здесь уже такой резкий характер изменения его траектории уже невозможен. Потому что представьте, машина весит 100 тонн или больше. И в этом случае выход на траекторию должен быть таким, чтобы угловая скорость вращения телескопа в конце концов совпала с угловой скоростью движения объекта.
Например, если он наводится на телескоп, то ему нужно сначала разогнаться, потом плавно затормозиться и затормозиться так, чтобы в момент торможения (он в окончательной точке) его угловая скорость совпала с угловой скоростью движения телескопа. При сопровождении у каких-то реальных объектов не может быть таких резких перемещений.
Когда у вас мобильный робот движется по черной линии, да, такие резкие движения возможны - он легкий, так что двигатель там эту машину крутит, может достаточно быстро повернуть, а здесь нет.
Рисунок 3. Траектория движения робота

Поэтому, если мы хотим, чтоб наш телескоп аккуратно вышел на объект, это должна быть достаточно плавная линия, которая будет постепенно выходить на наблюдение, на угловую скорость объекта и потихонечку с ней совпадать. В этом случае при наведении телескопа вы уже учитываете его инерцию, учитываете как раз, что эта конструкция телескопа, несмотря на то, что он большой, при разгоне или при каком-то резком торможении дрожит, возникают какие-то вибрации по телескопу, а техника, не смотря на ее размеры, не смотря на ее вес - все равно достаточно нежная и балки, которые держат телескоп, при движении тоже немного вибрируют и дают сбив, небольшой уход, и вкладывают дополнительные возмущения.
Поэтому при такого рода наблюдениях нужно обязательно плавно выходить на траекторию. Когда вы это делаете, вы должны учитывать характер движения объекта. В этом смысле вы строите прогноз движения объекта и уже ставите в соответствие не только свое текущее положение и положение объекта, но еще и рассчитанное положение объекта. Фактически, если бы телескоп знал точно все 6 параметров орбиты спутника (большая полуось, эксцентриситет, наклонение, долгота восходящего узла, аргумент перицентра, время прохождения перигея), то вы бы могли аккуратно сделать прогноз и вывести объект. Но если один из шести параметров неизвестен, то вам приходится в процессе движения их уточнять.
Для решения таких задач, как правило, используют фильтр Кауна. Он оптимально подходит для решения таких задач, потому что в них уже заложена модель движения и необходимо уточнить только параметры движения, а они уточняются за счет использования обратной связи.
Мы рассмотрели тяжелый объект, примерно 100 тонн и выше, и поняли, что его нужно плавно разгонять, плавно тормозить. И чем плавнее, без рывков, вы это делаете, тем лучше. Но если вы используете какие-то радиофизические средства, которые не используют механических элементов для поворотов, это так называемые антенны с электрическим управлением движения луча.
Например, у вас есть некоторая система антенн и летит спутник. В этом случае, если вы работаете с такими антеннами, а надо понимать, что они все синхронизированы (рисунок 4).
Рисунок 4
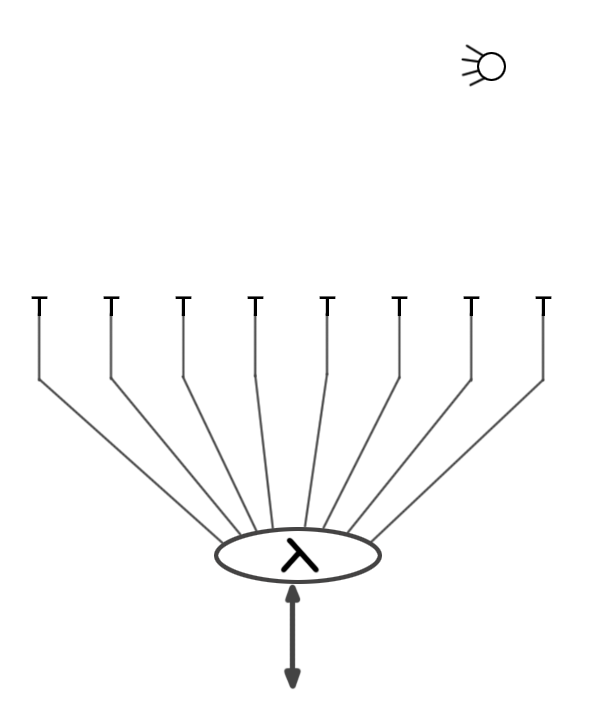
Если вы можете изменить разность фаз на этих антеннах, то это обеспечивает быстрое изменение наклона фазового фронта. То есть за счет электрического управления вы можете резко изменить наклон фазового фронта, задавая соответствующие команды фазовращателям, а максимум диаграмонаправленности всегда перпендикулярен этому самому фазовому фронту. А поменять разность фаз на антеннах - задача достаточно простая. И, самое главное, это можно сделать достаточно быстро.
Таким образом, если у вас есть, скажем, фазированная антенная решетка, то, меняя разность фаз на различных антеннах, меняя наклон фазового фронта, меняется положение диаграмм направленности, и в таком случае вы можете использовать так называемый пеленг. То есть, фактически использовать два или три луча. Потом регистрировать сигнал на каждом из этих лучей, и брать о направление, где сигнал больше. И строите дальше свой прогноз. Если объект переместился, то вы делаете вилку вокруг следующего луча и так далее. Постепенно эта вилка может заужаться, когда вы уже лучше понимаете характер движения объекта. Всегда в этих случаях, в этих системах, используется технология с обратной связью, то есть постепенно уточняются параметры движения объекта. В данном случае, это стандартный пеленг, который можно реализовать ввиду того, что можно очень быстро переключать направление основного излучения и по максимуму сигналу определять, в какую сторону движется объект.
Такие вещи используются в радиолокационных станциях, когда необходимо обнаружить какой-то новый объект, или когда штатный объект стал вести себя внештатно, например, произошло какое-то разрушение, а это происходит постоянно. Например, 8 мая 2020 года, произошло разрушение разгонного блока "Фрегат", и все быстро выехали на свои наблюдательные средства, наша команда нашего института в том числе, и следили за тем, как изменился характер движения объекта. В наших измерениях мы как раз использовали многолепестковую схему, и за несколько дней наблюдения объекта достаточно неплохо восстановили его орбиту.
Вообще говоря, алгоритмов слежения достаточно много, универсальной схемы наблюдения нет. Но всегда нужно отталкиваться от того, какой инструмент у вас есть. Если есть радар, который быстро позволяет управлять диаграммой направленности, может использоваться этот элемент, но могут использоваться и другие варианты. Если телескоп с тяжелой какой-то монтировкой, то конечно же нужно очень аккуратно следить за тем, как вы его будете поворачивать, плавно разгонять, плавно останавливать и аккуратно выводить на траекторию.
А перспективным методом сопровождения объекта является объединение достоинств как оптических, так и локационных средств. Это обеспечение возможности работы их в связке, потому что радиолокатор способен быстро, грубо определить траекторию объекта и уже по данной траектории передаст соответствующие целеуказания на телескоп, попробовать вывести его на траекторию. А в оптическом диапазоне все траекторные характеристики объекта, вся траекторная информация, его углы и положения, определяются намного точнее, чем радиофизическими средствами. Поэтому, если удается обеспечить совместную работу таких разных устройств, это позволяет достаточно быстро и точно сопровождать объект, определять параметры их орбиты и параметры их движения.Для размышления
Попробуйте самостоятельно построить списки всех преимуществ оптического и локационного методов слежения за спутником. После этого попробуйте собрать из их пунктов, список преимуществ объединённого метода слежения.